Студия «Имитационное моделирование.
Кружок робототехники Robotech 255»
Педагоги Ярмолинский Л. М., Ярмолинская М. В.
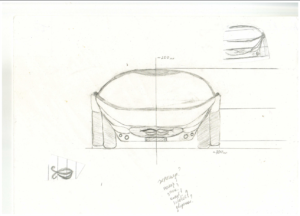
Проект “Мостовой кран”
Описание проекта
Морские перевозки играют большую роль в мировом товарообороте,
и оптимизация работы грузовых портов является актуальной и важной
задачей.
Санкт-Петербург — крупный морской/речной пассажирский и морской
грузовой порт с развитыми транспортными коммуникациями, сетью метро.
Нева, впадает в финский залив, образует большое число разветвленных
каналов и водных артерий своей дельты. Все это создает хорошие условия
для разработки новых решений по оптимизации работы порта. Мы
предполагаем, что использование подобного оборудования в порту может
значительно увеличить пропускную способность порта.
Используя опыт строительства каналов Санкт-Петербурга для
разработки инфраструктуры порта, можно организовать потоковый
пропуск судов, их автоматическую быструю разгрузку/погрузку с помощью
специальных роботизированных козловых консольных кранов
разгрузки/погрузки судов. Смотреть полностью….
Видео презентация проекта
Концепт машины будущего «JAM»
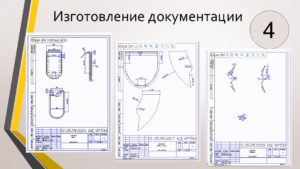
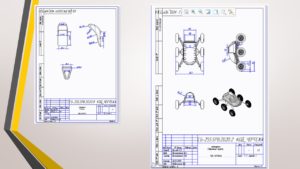
![]() 2020 г. — 1 место на региональном этапе Всероссийской олимпиады по 3D-технологиям
2020 г. — 1 место на региональном этапе Всероссийской олимпиады по 3D-технологиям
Подольский Евгений, 10 класс
Крылов Кирилл, 11 класс
«JAM (Job Automatic Machine)»
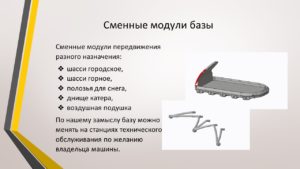
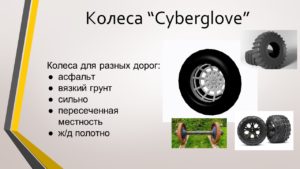
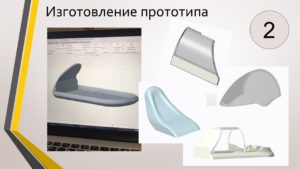
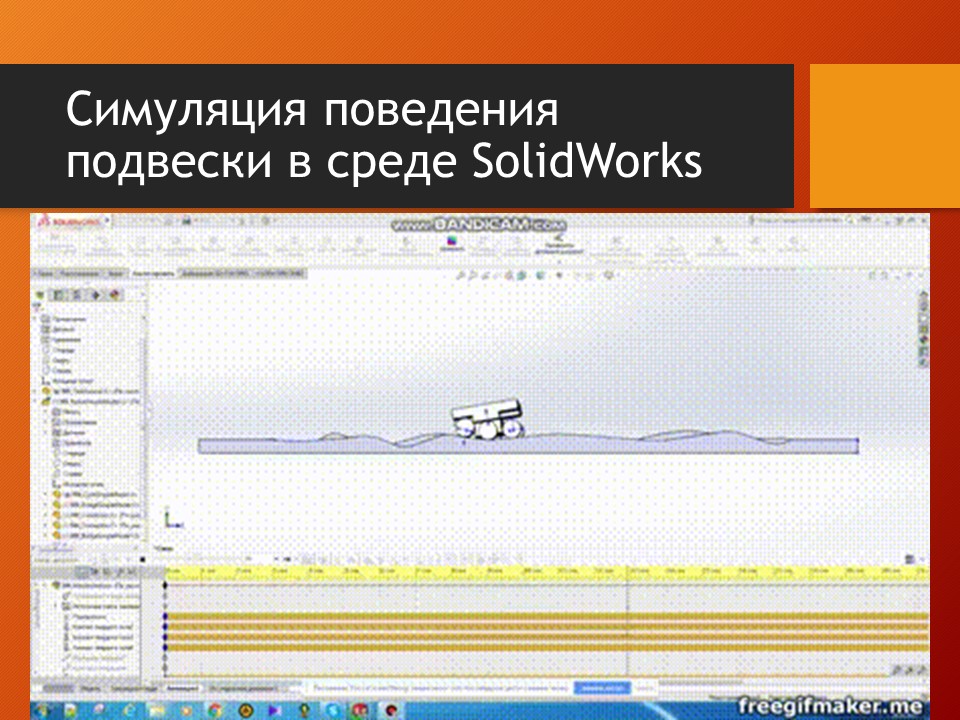
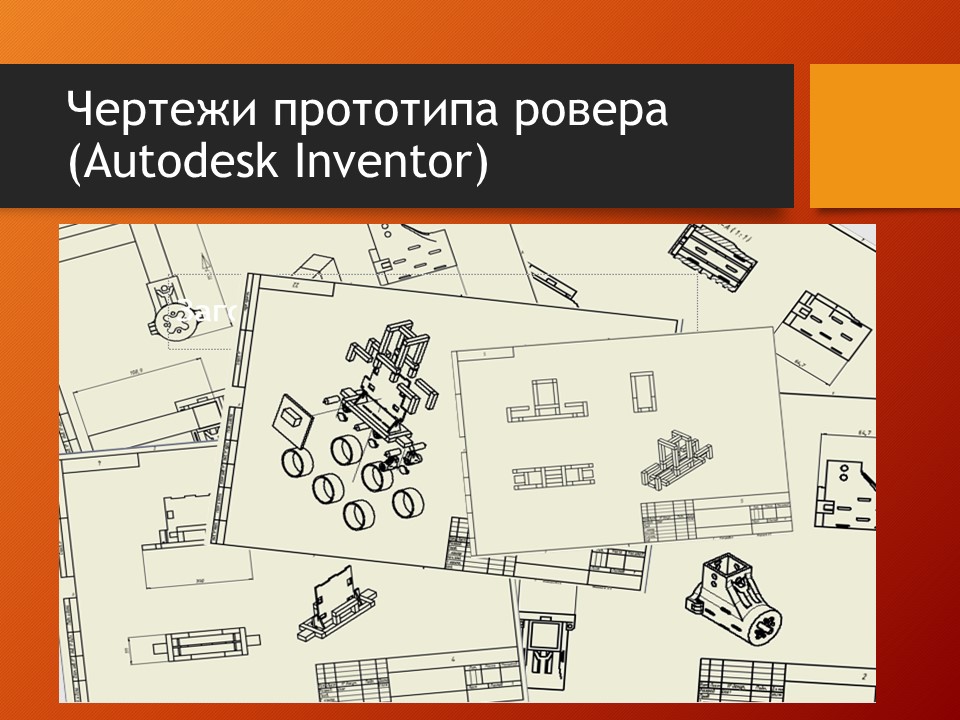
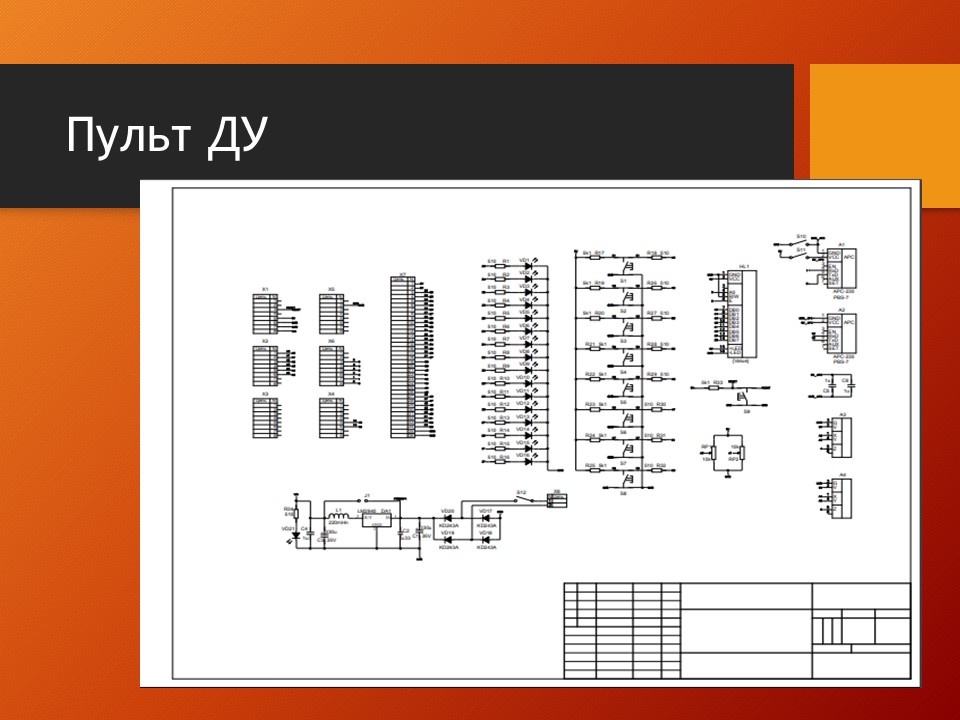
Наша команда представляет революционный проект в сфере автомобилестроения. Тема нашего продукта – создания концепции и разработка модели прототипа универсального и беспилотного автомобиля. Разработка происходила в два этапа: создание уменьшенного прототипа в масштабе 1/24 первой версии (CyberGlove) и создание уменьшенного прототипа в масштабе 1/18 второй версии (JAM).
|
Задачи проекта: 1) Изучить аналоги и тенденция на рынке. |
Основные положения концепции:
|
Версия 1.











Версия 2.
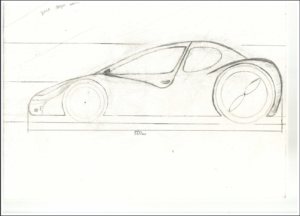
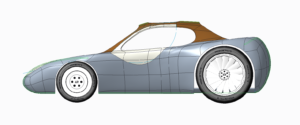

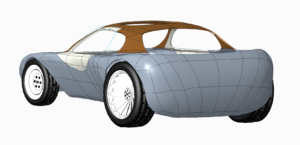
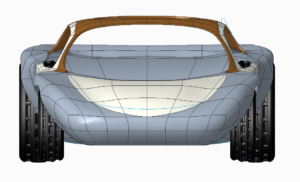

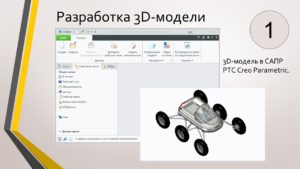
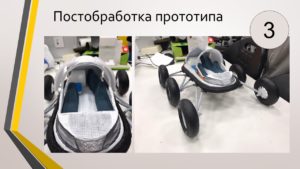
В настоящее время концепт реализуется на практике: разработан дизайн второй версии, распечатывается модель и разрабатывается электроника.
Планируем оснастить автомобиль искусственным интеллектом и машинным зрением.
Гоночная модель «ГАЗ-АА»
![]() 2019 г. — 2 место на городских соревнованиях в формате «Scalextric for school» (индивидуальный проект)
2019 г. — 2 место на городских соревнованиях в формате «Scalextric for school» (индивидуальный проект)




Гоночная модель выполнена в САПР PTC CREO Parametric 5.0, распечатана на 3D-принтере пластиком PLA, после постобработки покрашена акриловыми красками, отлажен механизм, спаян двигатель с токоведущими частями и светодиодами, имитирующими фары. Инструменты и комплектующие:
— набор деталей для проектирования и сборки шасси, паяльник, набор инструментов для ручных работ,
— персональный компьютер с САПР, 3D-принтер Mz-3D с пластиком PLA, дремель с набором насадок, набор акриловых красок, шпатлевка и др.
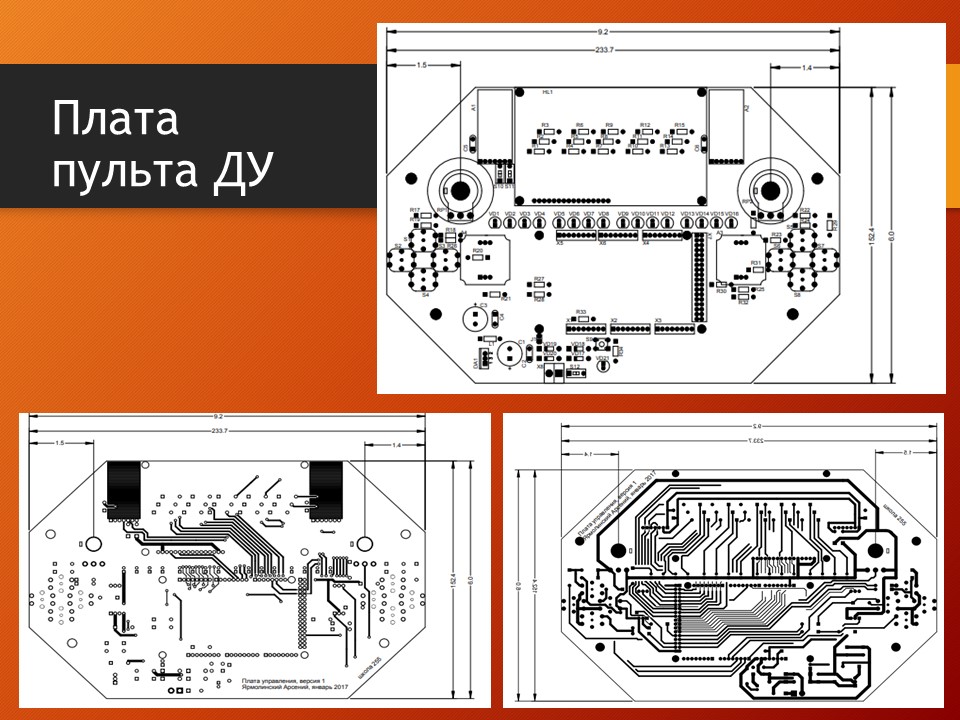
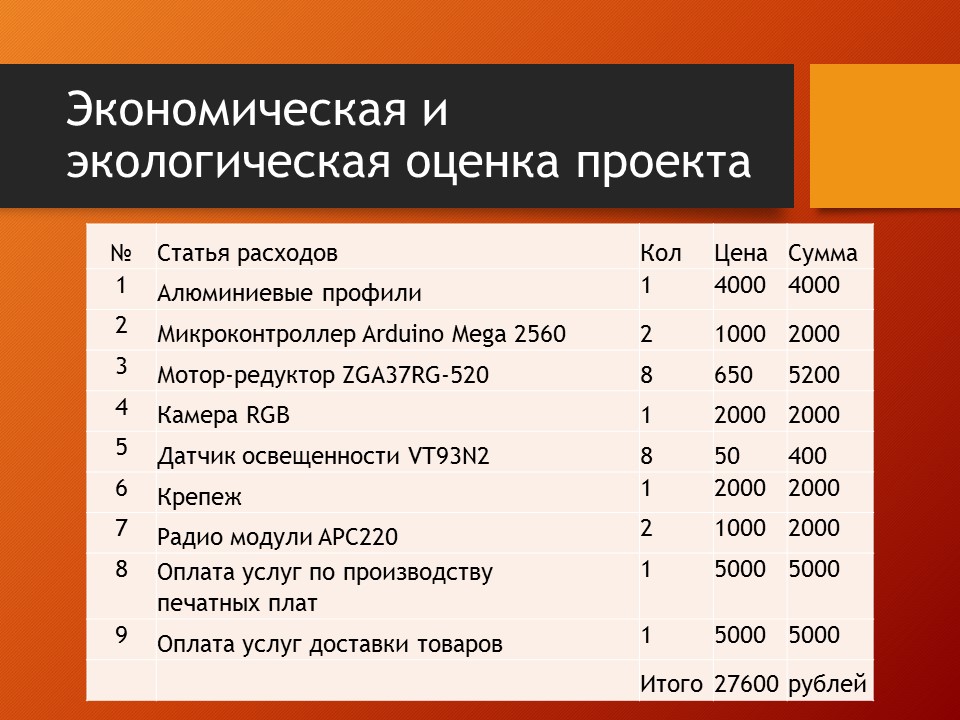
Робот для соревнований на Кубок РТК
![]()
2018 г. — 1 место в номинации «Экстремал PRO» на международном фестивале «Робофинист» (командная работа, 2 участника)
2018 г. — 2 место на финале кубка РТК в номинации «Экстремал PRO» (командная работа, 2 участника)
2019 г. — Победитель регионального этапа Всероссийской олимпиады по технологии (личное достижение)



Защита регионального этапа олимпиады по технологии
«Роботизированный комплекс подсчета и идентификации багажа
при погрузке на борт воздушного судна» v.2
![]()
2018 г. — 2 место на международном фестивале робототехники «Робофинист» в младшей творческой категории с инженерным проектом «Роботизированный комплекс подсчета и идентификации багажа при погрузке на борт воздушного судна» (в составе команды «Спасатели») (командная работа, 5 участников)
2018 г. – Победители городской межшкольной конференции «Лабиринты науки» на секции «Мастерская проектов» (командная защита, 5 участников)
Видео второй версии макета проекта
Презентация на секции «Мастерская проектов»![]()
2017 г. — 1 место на фестивале «Робофест» в номинации «Службы аэропортов» юниор, младшая категория (командная работа, 5 участников)
Видео первой версии макета проекта
Инженерная книга проекта
Скачать инженерную книгу проекта часть 1, часть 2 , часть 3, часть 4
«Спасатели»

Ролик «Спасатели»
Идея проекта —
создание комплекта техники для горных районов, которая поможет спасателям ликвидировать последствия снежных заносов и завалов.
Реализация — LEGO NXT (командная защита, 3 участника)
«Автоматическая Космическая солнечная Электростанция — Automatic Solar Power Station (ASPS-1)»
![]()
1 место в средней творческой категории на городских соревнованиях по робототехнике (командная работа, 4 участника)
4 место в средней творческой категории на всероссийском этапе WRO (командная защита, 3 участника)
2 место Балтийский научно-инженерный конкурс
3 место на региональном этапе научного конкурса Siemens (командная защита, 3 участника)





Проект «ASPS-1» посвящен проблемам энергетики будущего. ASPS – это аббревиатура от английского Automatic Solar Power Station (саморазворачивающаяся солнечная электростанция). На базе конструктора LEGO NXT была реализована идея разработки универсальных передвижных модулей – автономных передвижных мобильных солнечных батарей (мы назвали их «солары»), которые позиционируется через систему навигации (спутник, роль которого выполняла веб-камера) и совместно с другими подобными модулями образует автоматически разворачивающуюся солнечную электростанцию.
- Назначение комплекса программ: определение методами машинного зрения местоположения соларов, дистанционное управление соларами, учет поступающей электроэнергии, отслеживание погодных условий, дружелюбный и интуитивно понятный интерфейс оператора;
- Локализация и выполнение комплекса программ центра управления: локализация программы центра управления ASPS-1 и навигационной системой – компьютер, комплекс программ выполняется под управлением операционной системы Windows.
- Среда программирования: LabView, образовательная лицензия
- Входные данные комплекса программ: видеопоток с веб-камеры, значения енкодеров (датчиков угла поворота) двигателей механизмов дверей верхнего и нижнего отсеков станции, показания мультиметра, показания датчика угла поворота флюгера;
- Выходные данные комплекса программ: дистанционное по Bluetooth управление соларами (номер режима работы, коррекция координат);
- Визуализация на экране компьютера:интерактивная карта поверхности с текущим положением соларов и возможностью нанесения новых координат,диаграмма выработки и потребления электроэнергии на станции,диаграмма погодных условий.
«Фабрика канатов»
![]()
1 место в младшей творческой категории на городских соревнованиях по робототехнике
Chto_daet_SCADA-sistema_sovremennomu_proizvodstv
V.1 Макет канатовязальной машины из конструктора LEGO Minstorms RCX.
«Фабрика канатов. Модернизация»
![]()
1 место в старшей творческой категории на городских соревнованиях по робототехнике
Репортаж с выставки «Будущее России в высоких технологиях»
 V.2 Модернизация проекта см. видео «Представляем фабрику канатов»
V.2 Модернизация проекта см. видео «Представляем фабрику канатов»
Построение SCADA-системы на макете канатовязальной фабрики
Целью модернизации являлась разработка SCADA-системы управления макетом канатовязальной фабрики и визуализация параметров работы устройств и всего технологического процесса на автоматизированном рабочем месте оператора. Тема исследования обладает актуальностью и позволяет учащимся освоить понятие SCADA-системы на примере автоматизации реального практического макета. Несмотря на то, что реализованная модель канатной фабрики создана на базе конструктора Lego, ее описывает ряд технологических параметров, которые можно дистанционно регулировать и информация с которых представляет интерес для визуализации. Это – состояние датчиков натяжения нити, мощность двигателей моталок, наличие или отсутствие связи с микропроцессором, количество произведенного каната, скорость вращения моталок и пр. Была проведена нестандартная специальная работа по сопряжению устройств с микроконтроллером, знакомству с такими понятиями как драйвер устройства, протокол обмена, пакет данных. Особо нужно подчеркнуть то, что программа управления макетом написана не в учебной среде, а на инженерном графическом языке LabVIEW (Laboratory Virtual Instrumentation Engineering Workbench).
«Робот сортировщик»
![]()
Специальный приз учительского жюри на Балтийском научно-инженерном конкурсе 2009
(первый творческий проект студии)
 Целью данной работы было создание действующей модели демонстрационного робота-сортировщика на базе цифровой лаборатории “Lego Mindstorm RCX”. Для этого необходимо было решить следующие задачи: изучить возможности учебного оборудования “Lego Mindstorm RCX”; разработать работоспособную механическую конструкцию модели; написать комплекс программ управления функциональными узлами робота; разработать и отладить алгоритм работы робота на примере задачи сортировки деталей по интенсивности их окраски.
Целью данной работы было создание действующей модели демонстрационного робота-сортировщика на базе цифровой лаборатории “Lego Mindstorm RCX”. Для этого необходимо было решить следующие задачи: изучить возможности учебного оборудования “Lego Mindstorm RCX”; разработать работоспособную механическую конструкцию модели; написать комплекс программ управления функциональными узлами робота; разработать и отладить алгоритм работы робота на примере задачи сортировки деталей по интенсивности их окраски.
В рамках данной работы была разработана и запрограммирована модель механического робота-сортировщика. Роботу предлагалось расположить детали, окрашенные разными оттенками серого цвета, в порядке усиления интенсивности от светлого к темному, при условии, что все детали изначально и после сортировки располагаются на одной прямой на одинаковом расстоянии. Для решения поставленной задачи сконструирована модель робота-манипулятора и отлажен программный комплекс управления роботом, реализующий алгоритм задачи. Конструкция оптимизирована по скорости работы, а устройство манипулятора позволяет компенсировать ошибки позиционирования. Сортировка деталей по интенсивности их окраски осуществляется манипулятором робота, сканирующим попарно ряд деталей, подлежащих сортировке и изменяющих их взаимное расположение при необходимости. Поведение робота контролируется системой управления, программная часть которой разработана в объектно-ориентированной среде RoboLab v2.5.4. и исполняется на согласованной системе двух микроконтроллеров RCX наборов “Lego mindstorm”.
Работа над данным проектом позволила получить практический опыт работы с учебным оборудованием “Lego mindstorm RCX”. Приобрести навык прикладного программирования при решении технических задач. Опробовать на практике различные конструктивные решения, исследовать их достоинства и недостатки. Различные модели, создаваемые в “Lego mindstorm”, могут быть использованы в учебном процессе, формируя интерес учащихся к инженерному творчеству, позволяя воплощать в реальных моделях свои фантазии, идеи и при этом узнавать много нового.